Określenie Performance Level wg ISO 13849-1
Zadaniem normy PN-EN ISO 13849-1 jest określenie Performance Level wg ISO 13849-1, na podstawie którego należy zaprojektować część obwodu sterowania
Read MoreLista artykułów z tej kategorii:












W 1996 r. CEN opublikował ważną normę dla producentów maszyn – EN 954 – 1, „Bezpieczeństwo maszyn – Elementy systemów sterowania związane z bezpieczeństwem – Część 1: Ogólne zasady projektowania”. Standard ten wyznaczył etapy definiowania niezawodności części sterowania odpowiedzialnych za bezpieczeństwo, wprowadzając kategorie niezawodności, które stały się wszechobecne. Co zatem oznaczają te kategorie wg ISO 13849-1 i jak są one stosowane zgodnie z najnowszą normą bezpieczeństwa funkcjonalnego maszyn? Niniejszy cykl artykułów będzie odpowiedzią na te pytanie.
Wg definicji 3.1.2 PN-EN ISO 13849-1, kategoria to sklasyfikowanie elementów systemu sterowania związanych z bezpieczeństwem pod względem ich odporności na defekty oraz zachowania się w przypadku defektu; osiąga się to, stosując odpowiednie rozwiązania strukturalne, wykrywanie defektów i/lub niezawodność elementów.
Kategorie wg ISO 13849-1 są używane do opisu architektury części systemu sterowania związanych z bezpieczeństwem. Każda architektura reprezentuje ze sobą pewien poziom niezawodności, którego użycie wpływa na poziom redukcji ryzyka za pomocą części sterowania. Architektury te można stosować w równym stopniu w elektrycznych, elektronicznych, pneumatycznych, hydraulicznych lub mechanicznych systemach sterowania.
Norma PN-EN 954-1 zdefiniowała pojęcie tzw. kategorii (B, 1, 2, 3, 4), których odporność na defekty oraz zachowanie się w przypadku defektu zostały dobrze opisane, a odporność ta i zachowanie wyznaczały poziom niezawodności elementów systemów sterowania związanych z bezpieczeństwem. Norma PN-EN 954-1 wymagała stosowanie oceny ryzyka zagrażającego do redukcji ryzyka i na podstawie wyników oceny mogła zostać wybrana kategorii bezpieczeństwa.
Norma PN-EN 954-1 podkreślała w pierwszej kolejności ważność wyników oceny ryzyka wg PN-EN 1050, gdyż postanowienia normy PN-EN 954-1 nie rozważały całego ryzyka związanego ze sterowania maszyną, a tylko tę część oceny ryzyka, która ulegała zmniejszeniu po zastosowaniu określonych funkcji bezpieczeństwa podawanych przez normę PN-EN 954-1, czyli tylko tej części zmniejszania ryzyka, która jest uzyskana za pomocą elementów systemu sterowania związanych z bezpieczeństwem.
Określenie kategorii wg PN-EN 954-1 odbywało się za pomocą grafu opisanego w załączniku B normy PN-EN 954-1, a projekt systemu sterowania związanego z bezpieczeństwem musiał uwzględniać funkcję bezpieczeństwa (zatrzymanie awaryjne, ręczne lub automatyczne resetowanie, niespodziewane uruchomienie, wyposażenie: elektryczne, pneumatyczne czy hydrauliczne i inne) i być zgodny z postanowieniem wybranej kategorii.
Graf opisany w załączniku B normy pokazuje metodę doboru kategorii, uwzględniając ciężkość urazów S, możliwość uniknięcia zagrożenia P oraz częstość i czas narażenia F. Norma PN-EN 954-1 podkreślała, aby sposób dobierania elementów i projektowania części sterowania związanej z bezpieczeństwem był rozumiany jako część opisanej w normie EN 1050 oceny ryzyka, a nie jako jej substytut, co oznaczało, że projektowanie części sterowania związanej z bezpieczeństwem uwzględniające dobór kategorii, było wykonane na podstawie oceny ryzyka z wykorzystaniem zasad EN 1050 i było częścią całościowej oceny ryzyka związanej z maszyną.
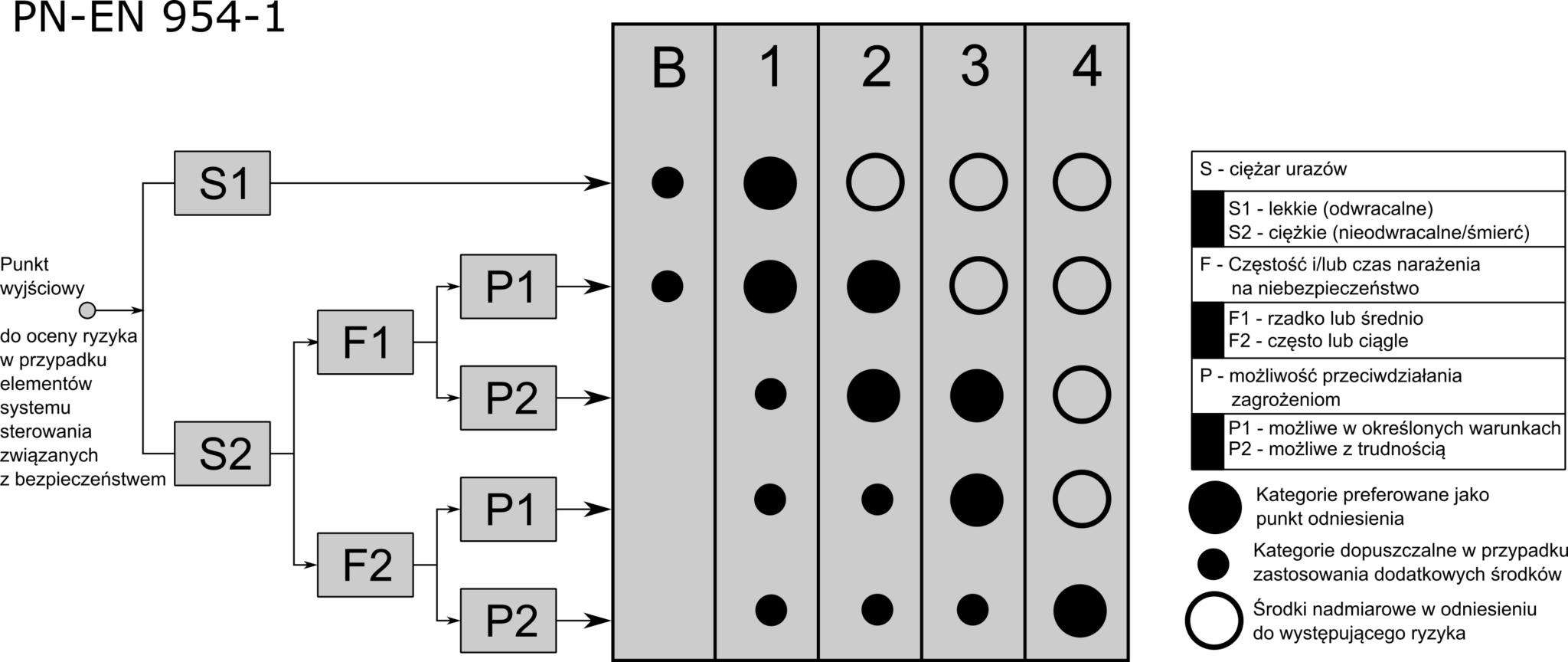
Norma PN-EN 954-1 w załączniku B podkreślała, że sposób dotyczący wyboru kategorii umożliwia tylko oszacowanie zmniejszenia ryzyka i jest przewidziany do wykorzystania jako wskazanie dla projektanta systemu bezpieczeństwa podczas doboru kategorii, na podstawie zachowania się elementu systemu sterowania związanego z bezpieczeństwem, w przypadku wystąpienia defektu. Jest to jednak tylko jeden punkt wpływający na uzyskiwanie celu, jakim jest zapewnienie bezpieczeństwa. Inne czynniki, które wpływają na niezawodność elementów to zastosowane rozwiązanie techniki i niezawodność elementów, które mogą wpływać na odchyłki od oczekiwanego wyboru kategorii.
Graf oceny ryzyka pozwalał wybrać odpowiednią kategorię, na podstawie której należało zaprojektować część sterowania związaną z bezpieczeństwem. Gdy podczas projektowania maszyny zastosowano już techniczne środki bezpieczeństwa, takie jak uniknięcie ostrych krawędzi, warunki ergonomiczne, odległości bezpieczeństwa i inne, następnym etapem była ocena zagrożenia operatora na ekspozycję w niebezpiecznej strefie. Dużym, wypełnionym kółkiem zaznaczono zalecane kategorie. W niektórych wypadkach dopuszczalna była zmiana kategorii na inną. Może to wykonać konstruktor lub osoba opracowująca normę typu C, zmieniając kategorię na inną, która jest zaznaczona albo małym kółkiem, albo dużym pustym. Norma zalecała w takich przypadkach, aby przyczyny odstępstwa były podane.
Dobór przytoczonych kategorii zależał głównie od zmniejszenia ryzyka osiąganego w wyniku stosowania funkcji bezpieczeństwa, prawdopodobieństwa wystąpienia defektów, ryzyka, które powstaje w przypadku wystąpienia defektu, możliwości uniknięcia defektu i zastosowanej techniki.
Norma PN-EN 954-1 była zharmonizowana z wycofaną już dyrektywą maszynową 98/37/WE i na dzień dzisiejszy norma ta nie może być już stosowana.
Norma ta w krajach WE obowiązywała przez 13 lat do momentu, gdy w grudniu 2009 roku została zastąpiona nową normą. Z tego względu, że w trakcie obowiązywania tej normy postęp techniczny umożliwiał już stosowanie programowalnych systemów bezpieczeństwa, obowiązywanie tej normy wykluczało możliwości ich wykorzystania, w związku z czym norma ta niedostatecznie obejmowała aktualny stan wiedzy techniki. Normie tej zarzucano również to, że zbyt ogólnie podchodzi ona do problematyki zapewnienia bezpieczeństwa, opisując jedynie sposób wyboru kategorii jako jedyną drogę do uzyskania wyniku, podczas gdy okazać się może, że niekoniecznie najbardziej rygorystyczne rozwiązanie jest rozwiązaniem najlepszym.
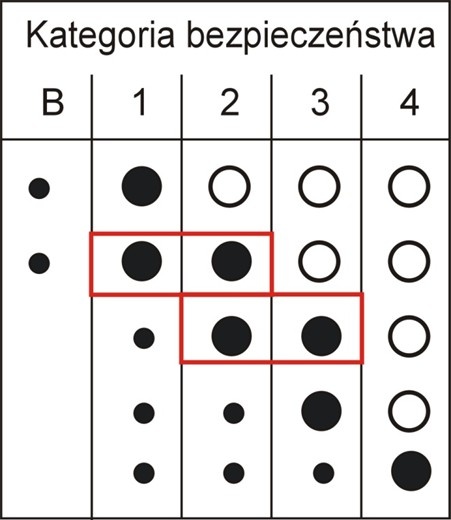
Norma skupiała się na jakościowym podejściu, przytaczając kategorie i opisując zachowanie się elementów sterowania związanych z bezpieczeństwem dla każdej z kategorii, lecz niewiele mówi o wskaźniku ilościowym, opisującym niezawodność użytych elementów w funkcji czasu, gdyż – jak się okazało – niekoniecznie zastosowanie kategorii 3 lub 4 musi być lepsze od kategorii 2. Innymi słowy – nie zawsze związek wysokości ryzyka z wybraną kategorią był przekonujący, co doprowadziło do przekonania, że w kształtowaniu niezawodności systemu bezpieczeństwa ważne są również zagadnienia probabilistyczne. Poza tym normie PN-EN 954-1 zarzucano niehierarchiczność zastosowanych kategorii, gdyż jeśli ocena ryzyka wskazywała możliwość użycia kategorii 1 lub 2 albo 2 lub 3, to siłą rzeczy wybierano gorszy przypadek, co doprowadzało do zwiększenia kosztów projektowanego systemu bezpieczeństwa (problem ten pokazany jest na rys. poniżej).
Im bardziej rozwijana była technologia problematyki bezpieczeństwa na przestrzeni kilkunastu lat obowiązywania normy PN-EN 954-1, tym bardziej poznawano przewidywalność zachowania się prostych systemów bezpieczeństwa, lecz z powodu rosnącego zaangażowania elementów elektronicznych i programowalnych w układach sterowania maszyn, proste systemy bezpieczeństwa przestały spełniać swoją rolę. Siłą rzeczy zintegrowanie bezpieczeństwa w bardziej złożonych układach elektronicznych zapewniało większą niezawodność, niż stosowanie elektromechanicznych przekaźników bezpieczeństwa w połączeniu z tymi układami. Zastosowanie bardziej złożonych elementów elektronicznych, które ze względu na elastyczność i możliwość programowania zmniejszały koszt uruchomienia i utrzymania, musiało skutkować wdrożeniem nowych zasad, które umożliwiłyby w znany już sposób zintegrować nowe możliwości w kształtowaniu systemów sterowania związanych z bezpieczeństwem. Poza tym, aby określić, czy dany system bezpieczeństwa jest odpowiednio przewidywalny, należałoby zdefiniować nowe wskaźniki, które pozwoliłyby usystematyzować czynniki niezawodności elementów sterowania związanych z bezpieczeństwem, wykrywania defektów oraz nienaruszalności strukturalnej i systematycznej. Rolą takiego usystematyzowania było wprowadzenie nowej normy ISO 13849-1.
Nowelizacja normy PN-EN 954-1 miała na celu wyposażenie jej w narzędzia probabilistyczne, nieodzowne w przypadku oceny nowoczesnych systemów sterowania związanych z bezpieczeństwem. Nie wyklucza się wiedzy, ani założeń normy PN-EN 954-1, gdyż uznano, że pierwotne jej postanowienia są właściwe, aczkolwiek niewystarczające. W dalszym ciągu jest zatem możliwość używania sprawdzonych już ogólnie kategorii, ale z dodatkową oceną ilościową właściwości dotyczących bezpieczeństwa. Stąd obok kategorii, w normie PN-EN ISO 13849-1 pojawiają się takie pojęcia, jak:
Dlatego sam wybór kategorii w nowym podejściu wprowadzonym przez normę PN-EN ISO 13849-1 nie był już celem. Głównym celem stał się poziom zapewnienia bezpieczeństwa PLr, a kategoria stała się jednym ze składników, które w połączeniu miały na celu osiągnięcie odpowiedniego PLr.
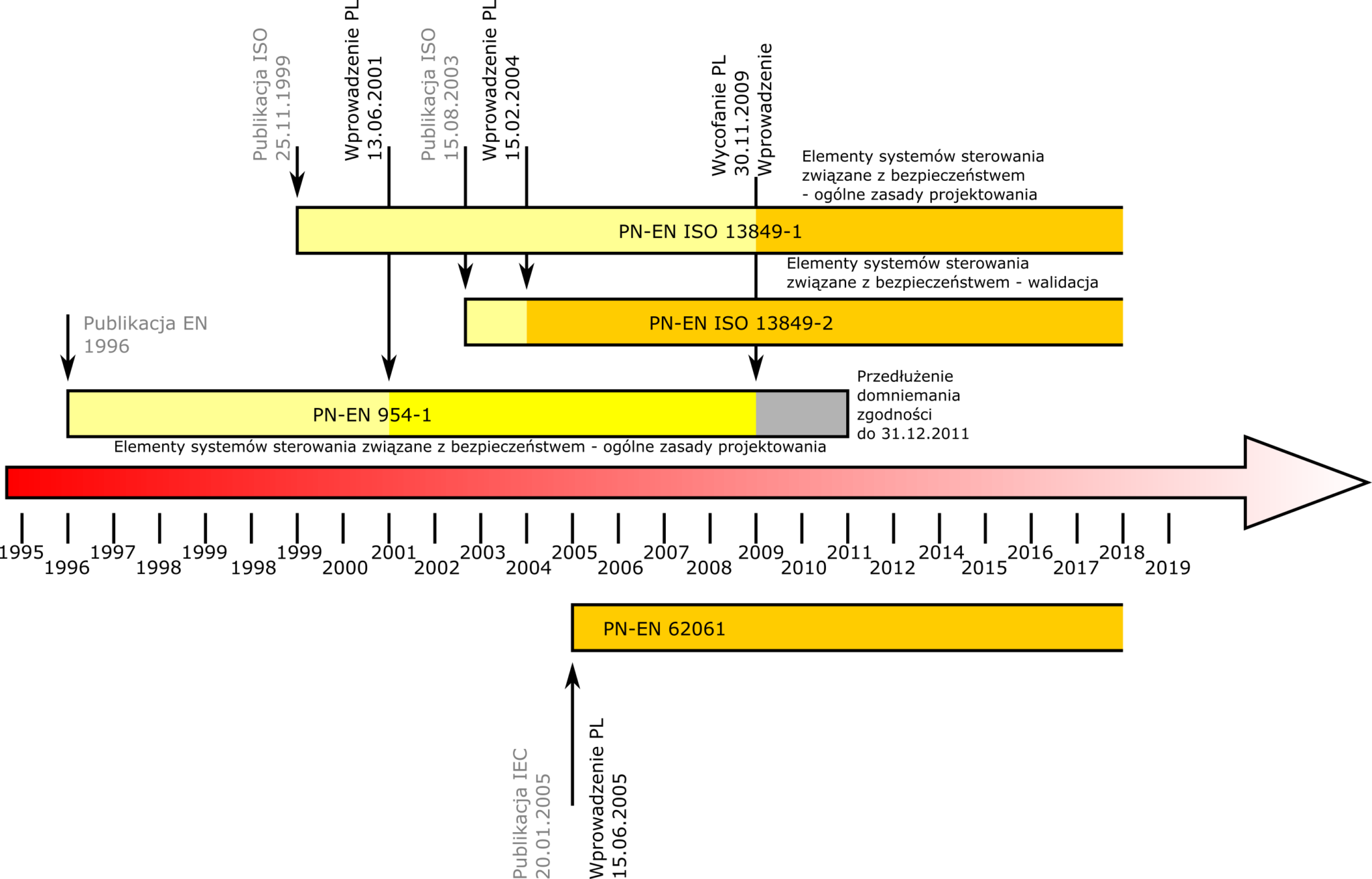
Pierwsze wydanie tej ostatniej normy miało miejsce w 2005 roku. Norma PN-EN ISO 13849-1 stała się trudną normą, wymagającą od integratora przeprowadzania skomplikowanych i czasochłonnych obliczeń. Odpowiedzią na to stało się opracowanie oprogramowania SISTEMA wspomagającego te obliczenia. Obowiązywanie norm dotyczących bezpieczeństwa dla sektora maszynowego pokazano na rysunku poniżej.
Norma PN-EN ISO 13849-1 w załączniku A przedstawia metodę określenia poziomu zapewnienia bezpieczeństwa PLr. Metoda ta jest przewidziana jako wytyczne dla projektanta przy określaniu PLr dla każdej niezbędnej funkcji bezpieczeństwa, którą ma realizować część obwodu sterowania związana z bezpieczeństwem. Metoda ta nie jest obowiązkowa i możliwe jest zintegrowanie ogólnej metody oceny ryzyka i procesu redukcji ryzyka (wg PN-EN ISO 12100 i ISO/TR 14121-2) wraz z określeniem wymaganego poziomu zapewnienia bezpieczeństwa PLr.
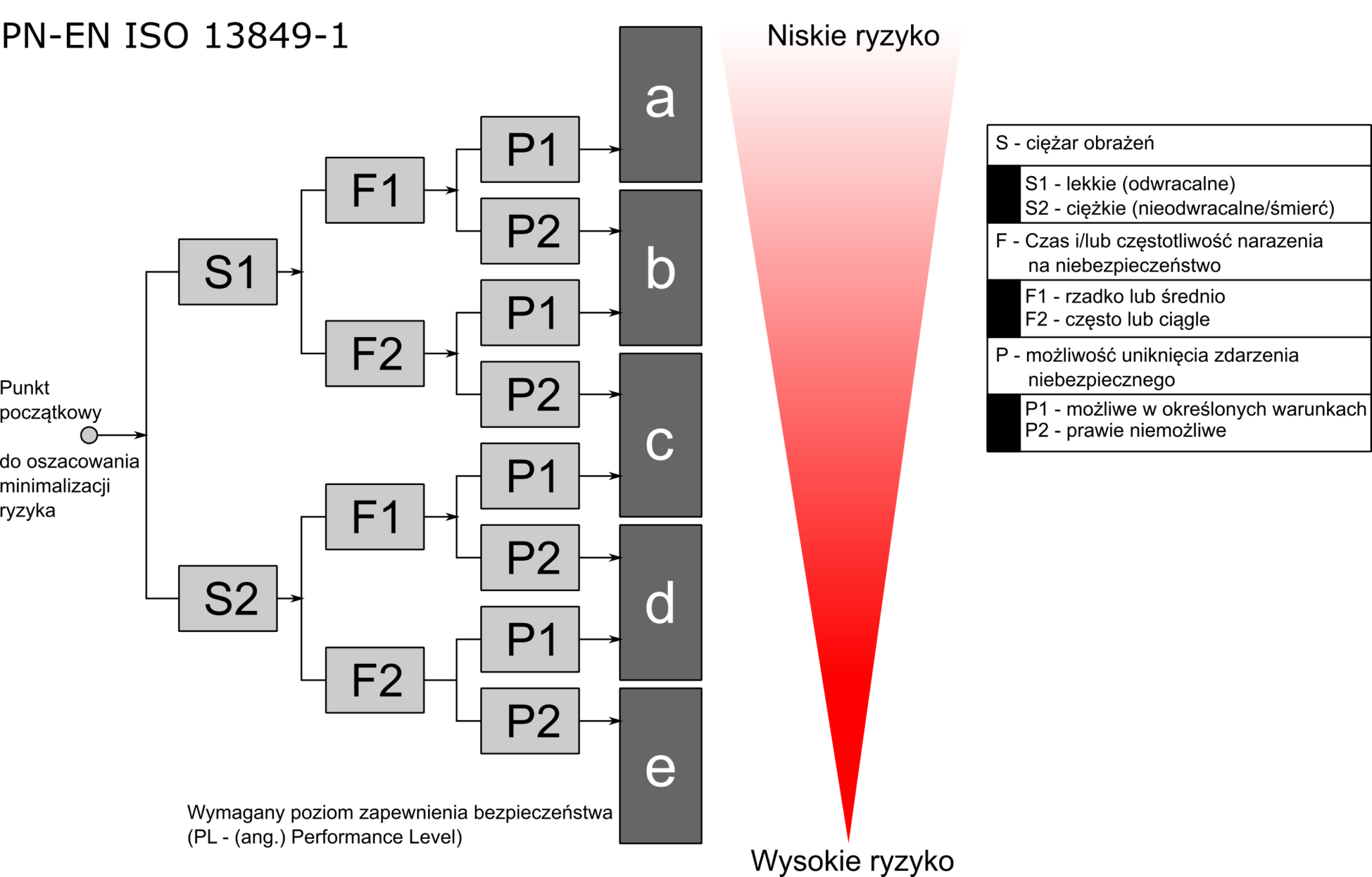
Na podstawie kategorii (architektury) części sterowania odpowiedzialnej za bezpieczeństwo, średniego spodziewanego czasu do uszkodzenia niebezpiecznego MTTFD komponentów, z których zaprojektowano funkcję bezpieczeństwa, pokrycia diagnostycznego dla części wejściowej, logicznej i wyjściowej funkcji bezpieczeństwa, szacowania skutków uszkodzeń o wspólnej przyczynie CCF oraz zastosowania środków zapobiegania uszkodzeniom systematycznym poprzez zastosowanie podstawowych i wypróbowanych zasad bezpieczeństwa możliwe jest uzyskanie wymaganego poziomu PLr.
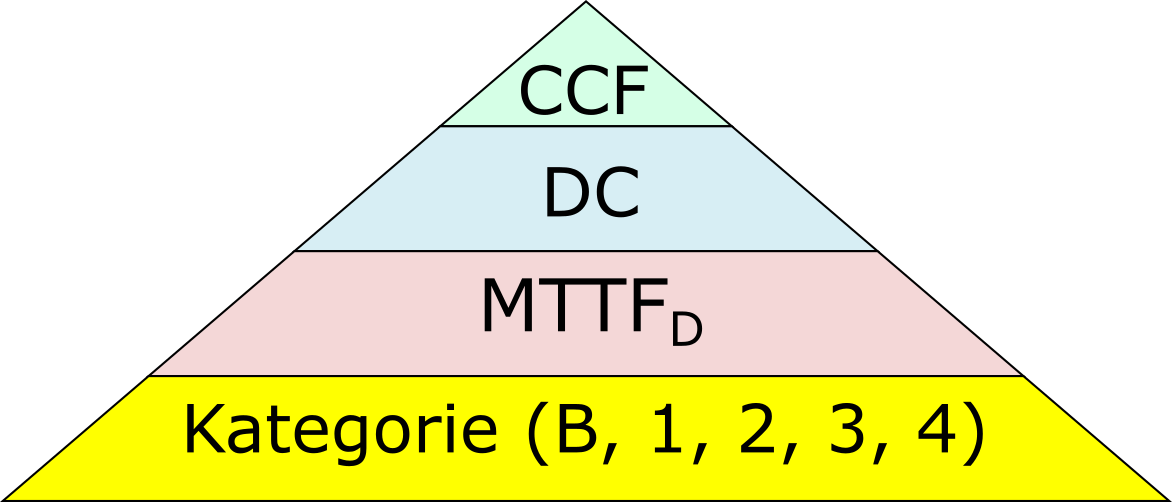
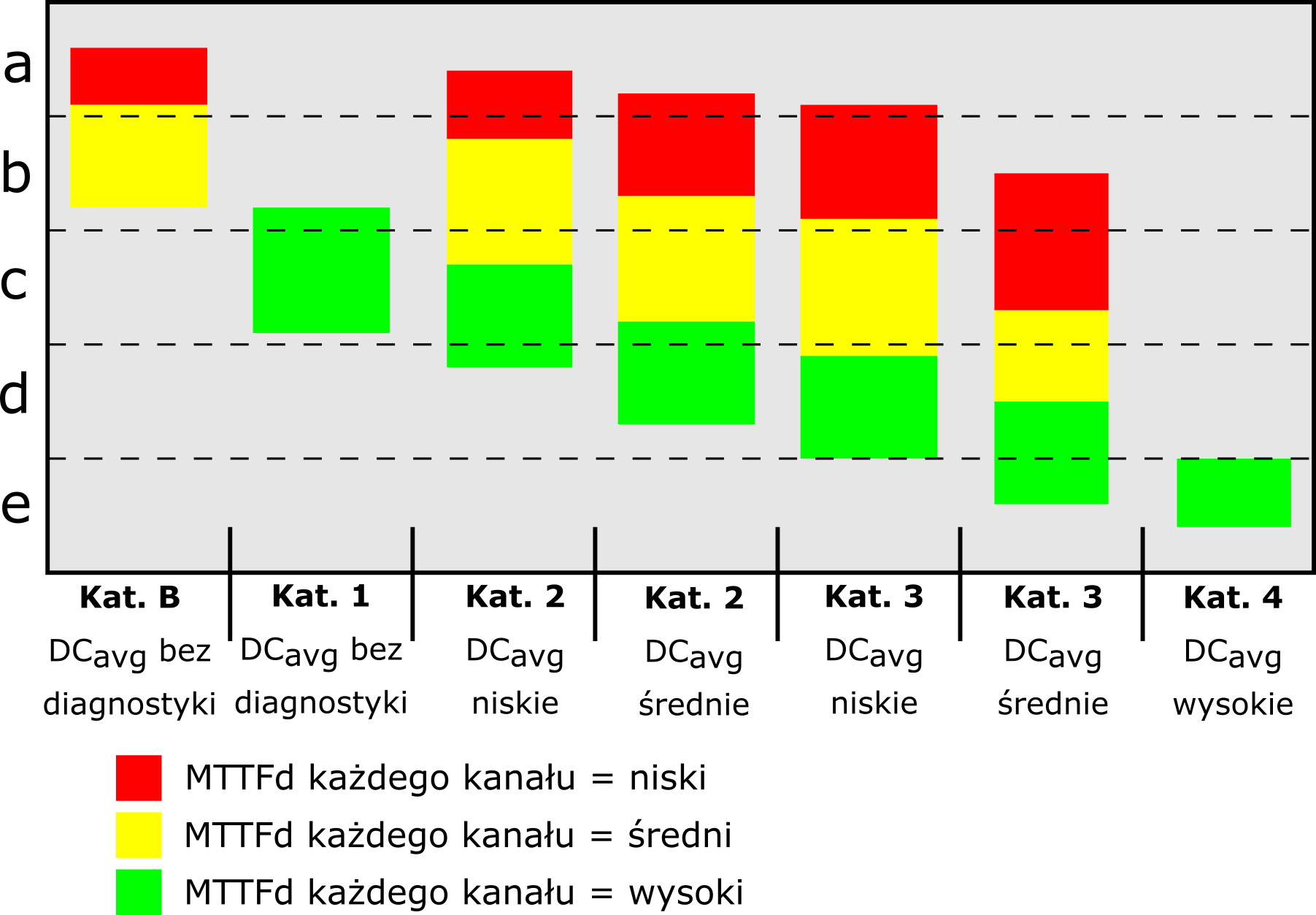
Kategorie w nieco zmienionej wersji nadal funkcjonują w obowiązującej normie PN-EN ISO 13849-1. Nie są już jednak głównym celem normy, a fundamentem, jaki jest ważny dla osiągnięcia celu, jakim jest wymagany poziom zapewnienia bezpieczeństwa PLr (Performance Level). Wówczas z połączenia kategorii, pokrycia diagnostycznego DC, oraz średniego czasu do uszkodzenia niebezpiecznego MTTFD możliwe jest uzyskanie określonego poziomu PLr (a, b, c, d lub e), jak pokazano na rys. 5 wg PN-EN ISO 13849-1.
Cykl artykułów na temat kategorii jest poświęcony szczegółowym rozważaniom na temat charakterystyki architektury wszystkich kategorii (B, 1, 2, 3 i 4). Bardzo ważne jest to, aby zrozumieć, czym cechuje się każda z kategorii, aby można było odpowiednio zaprojektować funkcję bezpieczeństwa oraz dokonać oceny, jaki poziom PLr dana funkcja osiąga, np. z wykorzystaniem oprogramowania SISTEMA.
Dlatego “rozbierzemy” normę ISO 13839-1 “na części”, aby stało się jasne, jakie cechy charakteryzują funkcję bezpieczeństwa. W sposób szczegółowy zostaną omówione wszystkie kategorie wg ISO 13849-1.

Zadaniem normy PN-EN ISO 13849-1 jest określenie Performance Level wg ISO 13849-1, na podstawie którego należy zaprojektować część obwodu sterowania
Read More
Aby zrozumieć normę PN-EN ISO 13849-1, warto wiedzieć trochę o tym, z czego korzystano, definiując podstawowe założenia nowego standardu. Performance
Read More
MTTFD to czas wyrażony w latach, który określa w sposób statystyczny spodziewany średni czas do uszkodzenia niebezpiecznego Oczywiście definicja wymaga
Read More
Zrozumienie, czym jest pokrycie diagnostyczne DC opisane w normie ISO 13849-1 ma kluczowe znaczenie dla analizy funkcji bezpieczeństwa ocenianej za
Read More
Kategoria B, wraz z innymi kategoriami pojawiła się wraz z pojawieniem się normy EN 954-1 w 1996 r. Od tamtej
Read More
Pojęcie kategorii B, które jest kategorią podstawową dla wszystkich następnych kategorii (1, 2, 3 i 4) zostało omówione szczegółowo w
Read More
Kategoria 2 została po raz pierwszy zdefiniowana w wycofanej już normie EN 954-1. Odkąd kategoria ta została uzupełniona o wskaźniki
Read More
Kategoria 3 to chyba najczęściej spotykana architektura części sterowania odpowiedzialnej za bezpieczeństwo. Popularność tej kategorii wynika z faktu, że zapewnia
Read More
Kategoria 4 jest najbardziej niezawodna spośród pięciu architektur zdefiniowanych w normie PN-EN ISO 13849-1. Kategoria 4 wykorzystuje techniki tolerancji na
Read More
W praktyce rzadko się trafia na „książkowo” zaprojektowane funkcje bezpieczeństwa. W celu realizacji funkcji bezpieczeństwa często łączy się ze sobą
Read More