Określenie Performance Level wg ISO 13849-1
Zadaniem normy PN-EN ISO 13849-1 jest określenie Performance Level wg ISO 13849-1, na podstawie którego należy zaprojektować część obwodu sterowania
Read MoreElementy bezpieczeństwa maszyny to techniczne środki ochronne i osłony, które stosowane są w celu zapewnienia bezpieczeństwa obsługi maszyny.
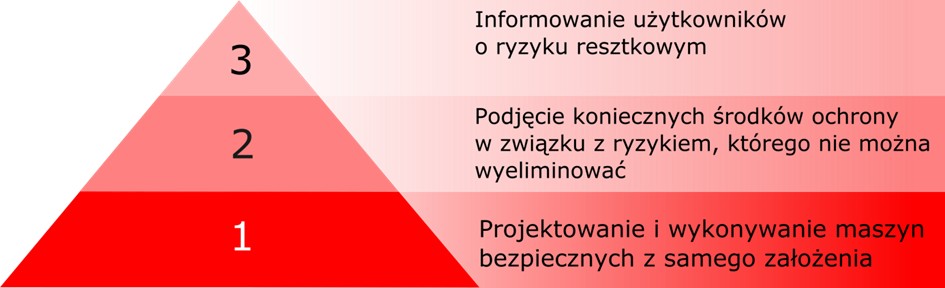
Projekt i budowa maszyny musi się odbywać wg zasad bezpieczeństwa kompleksowego wg p. 1.1.2 b) dyrektywy maszynowej MD 2006/42/WE, które podane są poniżej obrazkowo w postaci tzw. triady bezpieczeństwa.

Zadaniem normy PN-EN ISO 13849-1 jest określenie Performance Level wg ISO 13849-1, na podstawie którego należy zaprojektować część obwodu sterowania
Read More
Aby zrozumieć normę PN-EN ISO 13849-1, warto wiedzieć trochę o tym, z czego korzystano, definiując podstawowe założenia nowego standardu. Performance
Read More
MTTFD to czas wyrażony w latach, który określa w sposób statystyczny spodziewany średni czas do uszkodzenia niebezpiecznego Oczywiście definicja wymaga
Read More
Zrozumienie, czym jest pokrycie diagnostyczne DC opisane w normie ISO 13849-1 ma kluczowe znaczenie dla analizy funkcji bezpieczeństwa ocenianej za
Read More
Kategoria B, wraz z innymi kategoriami pojawiła się wraz z pojawieniem się normy EN 954-1 w 1996 r. Od tamtej
Read More
Pojęcie kategorii B, które jest kategorią podstawową dla wszystkich następnych kategorii (1, 2, 3 i 4) zostało omówione szczegółowo w
Read More
Kategoria 2 została po raz pierwszy zdefiniowana w wycofanej już normie EN 954-1. Odkąd kategoria ta została uzupełniona o wskaźniki
Read More
Kategoria 3 to chyba najczęściej spotykana architektura części sterowania odpowiedzialnej za bezpieczeństwo. Popularność tej kategorii wynika z faktu, że zapewnia
Read More
Kategoria 4 jest najbardziej niezawodna spośród pięciu architektur zdefiniowanych w normie PN-EN ISO 13849-1. Kategoria 4 wykorzystuje techniki tolerancji na
Read More
W praktyce rzadko się trafia na „książkowo” zaprojektowane funkcje bezpieczeństwa. W celu realizacji funkcji bezpieczeństwa często łączy się ze sobą
Read More